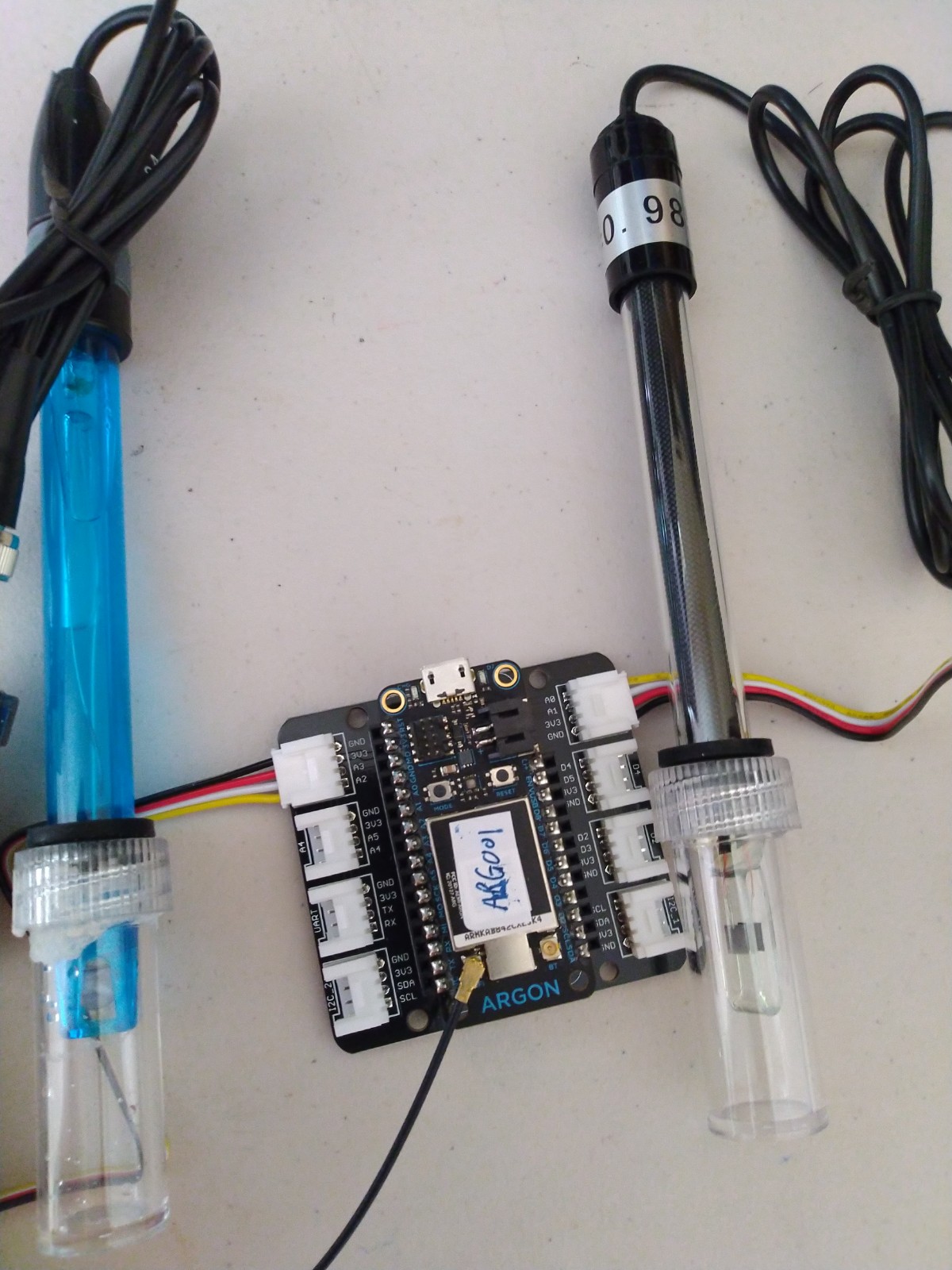
This the sensor we are going to build in this exercise.

This guide is based on these materials:
We will need the following hardwares:
A Particle Argon (Can be bought here)
USB Data Cable
Grove - EC Sensor Kit (Can be bought here)
Grove - PH Sensor Kit (E-201C-Blue) (Can be bought here)
Grove Shield FeatherWing for Particle Mesh and all Feathers (Can be bought here)
Jumper Wires x 4 (Can be bought here)
Breadboard (Can be bought here)
Soldering Kit (Can be bought here)
Laptop or Computer
Connect the Argon, Grove shield, Grove - EC Sensor and Grove - PH Sensor as shown. The EC sensor to the A0 connector and the PH Sensor to the A2 connector.
Refer to to register the Argon Device with our Particle account.
Flash the script ‘STAPI_1_PH_1_EC’ to the Argon. Fill in the mandatory parameters accordingly. You can choose to leave the optional parameters to their default values.
============================================================================================= !!! MANDATORY PARAMETERS ============================================================================================= String thingDesc = "water quality of greenhouse"; //DESCRIBE THE DEPLOYMENT int sample_rate = 10 * 1000; // how often you want device to publish where the number in front of a thousand is the seconds you want ============================================================================================= OPTIONAL PARAMETERS (this parameters only works when it is the first time registration of the device) (if the device is already registered, these options are ignored) ============================================================================================= //Description of the location String foiName = "na"; //THE LOCATION NAME String foiDesc = "na"; //Define the geometry of the location. Geometry types from geojson is accepted. Refer to https://tools.ietf.org/html/rfc7946 for geometry types. String locType = "Point"; String enType = "application/vnd.geo+json"; //Define the location of the thing. If location is not impt, use [0,0,0] the null island position. float coordx = 0.0; //lon/x float coordy = 0.0; //lat/y float coordz = 0.0; //elv/zCalibrate the sensors according to the guide.